Dans cet article, nous allons voir les bases du calcul vectoriel dans un repère. Pour rappel, un vecteur peut se représenter simplement dans l’espace comme un segment orienté. Il se définit par deux points dans l’espace qui se relient entre eux. L’espace est très souvent représenté par un repère orthogonal définit par l’axe des abscisses (axe horizontal) et l’axe des ordonnées (axe vertical). Il est intéressant d’étudier les positions de ces vecteurs entre eux (ils peuvent par exemple être colinéaires ou coplanaires). On retrouve également plusieurs formules permettant d’étudier les positions relatives de ces vecteurs ou tout simplement calculer les coordonnées de ces vecteurs à l’aide de leurs points.
Vecteurs colinéaires et coplanaires
Vecteurs colinéaires
Deux vecteurs \(\vec{u}\) et \(\vec{v}\) (non nuls) sont colinéaires s’il existe un nombre réel \(k\) tel que :
\[\fbox{\(\vec{v}=k\vec{u}\)}\]
Soit encore : deux vecteurs sont colinéaires si, et seulement si, l’un est multiple de l’autre.
Vecteurs coplanaires
On dit que trois vecteurs \(\vec{u}\), \(\vec{v}\) et \(\vec{w}\) sont coplanaires s’il existe deux nombres \(a\) et \(b\) tels que :
\[ \fbox{\(\vec{w}=a\vec{u}+b\vec{v}\)}\]
Repères de l’espace
Un repère de l’espace est un quadruplet constitué d’un point et de trois vecteurs non coplanaires.
Exemples :
- \((O;\vec{i};\vec{j};\vec{k})\) est un repère de l’espace
\(\:\)
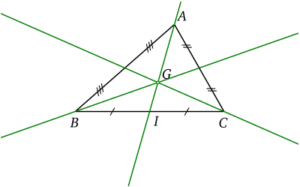
- Sur la figure ci-dessous, le triplet \(A;\vec{u};\vec{v})\) est un repère du plan \((ABC)\)

Pour tout point \(M\) de l’espace, il existe trois nombres uniques \(x\), \(y\) et \(z\) tels que :
\[ \fbox{\(\overrightarrow{OM}=\vec{xi}+\vec{yj}+\vec{zk}\)}\]
Où \(x\), \(y\) et \(z\) sont respectivement l’abscisse, l’ordonnée et la cote de \(M\) ou du vecteur \(\overrightarrow{OM}\).
Remarques
- Si les trois vecteurs sont de même longueur et orthogonaux deux à deux, alors le repère est orthonormé.
\(\:\)
- Les mêmes points ont des coordonnées pouvant être distinctes selon les repères que l’on considère.
Formules utiles
Quel que soit le repère utilisé :
- Si \(A(x_A;y_A;z_A)\) et \(B(x_B;y_B;z_B)\) sont deux points ;
- Si \(I\) est leur milieu ;
- Et si \(\vec{u}(x;y;z)\) et \(\vec{u’}(x’;y’;z’)\);
\(\:\)
Alors :